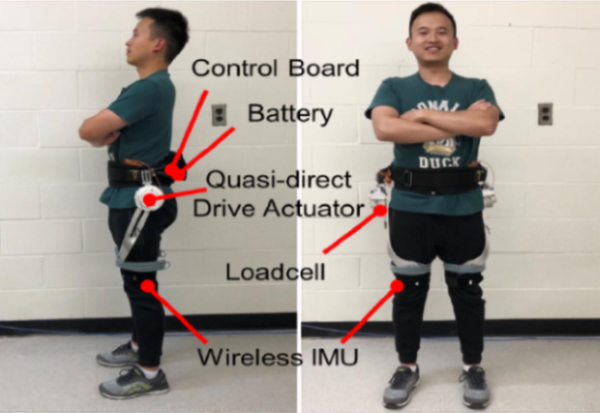
Portable Hip Exoskeleton
 Datasheet
Datasheet
Specifications
| Property | Value |
|---|---|
| Nominal Voltage | 42V |
| Motor Nominal Torque | 2 Nm |
| Motor Peak Torque | 6 Nm |
| Motor Nominal Speed | 1500 RPM |
| Gear ratio | 8:1 |
| Actuator Output Nominal Torque | 16 Nm |
| Actuator Output Peak Torque | 45 Nm |
| Actuator Output Speed | 188 RPM |
| Mass (without battery) | 2.6 kg |
| Mass (with battery) | 3.4 kg |
| Flexion/Extension Abduction/Adduction |
130°/40° 90°/60° |
| Actuation type | Portable |
| Battery life | 2 hours |
Video
Publication
Yu S, Huang TH, Yang X, Jiao C, Yang J, Chen Y, Yi J, Su H. "Quasi-Direct Drive Actuation for a Lightweight Hip Exoskeleton with High Backdrivability and High Bandwidth", IEEE/ASME Transactions on Mechatronics, vol. 25, no. 4, pp. 1794-1802, Aug. 2020, doi: 10.1109/TMECH.2020.2995134.
![]() PDF
| Video
PDF
| Video